车载激光雷达白皮书(附下载)
judy 在 周三, 01/05/2022 - 10:30 提交
目前,超过 100 家不同的开发公司已投入约 10 亿美元,用于开发高分辨率激光雷达( LiDAR )传感器。随着多家 OEM 厂商宣布将激光雷达解决方案纳入畅销车型,其在汽车市场中的应用也将提速。
目前,超过 100 家不同的开发公司已投入约 10 亿美元,用于开发高分辨率激光雷达( LiDAR )传感器。随着多家 OEM 厂商宣布将激光雷达解决方案纳入畅销车型,其在汽车市场中的应用也将提速。

模块复用是逻辑设计人员必须掌握的一个基本功,通过将成熟模块打包成IP核,可实现重复利用,避免重复造轮子,大幅提高我们的开发效率。

为建立具备良好性能、功耗、价格平衡度的全新系统级封装( SiP )产品系列,Octavo Systems 将目光转向赛灵思 Zynq UltraScale+ MPSoC 平台,并推出全新 OSDZU3 产品系列,不仅将赛灵思 MPSoC 的性能与灵活性优势发挥到极致,也为Octavo System 的发展提供了更广阔的舞台。
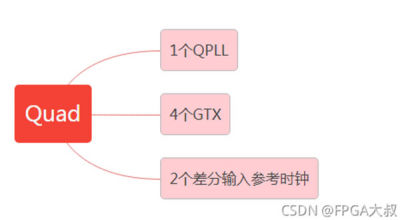
时钟就是脉搏,能否工作全靠它!话不多说,直接上干货!文中全部使用GTX代指GT Transceiver,同样适用于GTH。
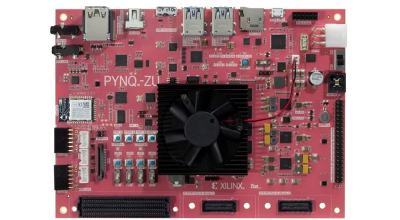
PYNQ-ZU是Zynq®UltraScale+™xczu5eg - 1sfvc784 MPSoc开发板,兼容Arduino、标准树莓派、LMC等各种接口,这使得PYNQ-ZU的具有极大的可拓展性与开源性。与PYNQ-Z2一样使用PYNQ框架,PYNQ 是 Xilinx 的一个开源项目

面积通常指一个设计消耗FPGA/CPLD的逻辑资源的数量,通常用可消耗的FF(触发器)和LUT(查找表)来衡量。速度指设计在芯片上稳定运行所能达到的最高频率,这个频率由设计的时序状况来决定,以及设计满足的时钟要求

本视频演示如何使用机器学习从单个高分辨率相机输入创建“虚拟”相机。 分析单个高分辨率 4K 摄像机输入以识别面部并自动跟踪、裁剪和创建多个高清 (HD) 虚拟流。

在Xilinx的DisplayPort 1.4 IP的文档中,提到支持的器件为Ultrascale/Ultrascale+/Versal系列,但很多的客户基于成本的考量希望能在7系列的器件中实现DP1.4。
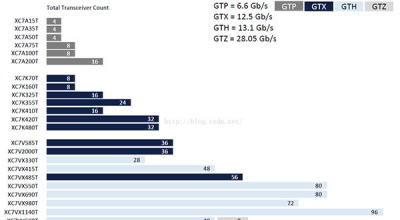
理解GTX的必备姿势,学起来!

FIFO最常被用来解决写、读不匹配的问题(时钟、位宽),总结下来,其实FIFO最大的作用就是缓冲。既然是缓冲,那么就要知道这个缓存的空间到底需要多大。