作者:碎碎思 ,来源:OpenFPGA微信公众号
K7平台的Microblaze搭建LWIP
1、概述
lwip 是瑞典计算机科学院(SICS)的 Adam Dunkels 开发的一个小型开源的 TCP/IP 协议栈。实现的重点是在保持 TCP 协议主要功能的基础上减少对 RAM 的占用。
LwIP 是 Light Weight (轻型)IP 协议,有无操作系统的支持都可以运行。LwIP 实现的重点是在保持 TCP 协议主要功能的基础上减少对 RAM 的占用,它只需十几 KB 的 RAM 和 40K 左右的 ROM 就可以运行,这使 LwIP 协议栈适合在低端的嵌入式系统中使用。
lwIP 协议栈主要关注的是怎么样减少内存的使用和代码的大小,这样就可以让 lwIP 适用于资源有限的小型平台例如嵌入式系统。为了简化处理过程和内存要求,lwIP 对 API 进行了裁减,可以不需要复制一些数据。
lwip 提供三种 API:1)RAW API 2)lwip API 3)BSD API。
RAW API 把协议栈和应用程序放到一个进程里边,该接口基于函数回调技术,使用该接口的应用程序可以不用进行连续操作。不过,这会使应用程序编写难度加大且代 码不易被理解。为了接收数据,应用程序会向协议栈注册一个回调函数。该回调函数与特定的连接相关联,当该关联的连接到达一个信息包,该回调函数就会被协议 栈调用。这既有优点也有缺点。优点是既然应用程序和 TCP/IP 协议栈驻留在同一个进程中,那么发送和接收数据就不再产生进程切换。主要缺点是应用程序不 能使自己陷入长期的连续运算中,这样会导致通讯性能下降,原因是 TCP/IP 处理与连续运算是不能并行发生的。这个缺点可以通过把应用程序分为两部分来克服,一部分处理通讯, 一部分处理运算。
lwip API 把接收与处理放在一个线程里面。这样只要处理流程稍微被延迟,接收就会被阻塞,直接造成频繁丢包、响应不及时等严重问题。因此,接收与协议处理必须 分开。LwIP 的作者显然已经考虑到了这一点,他为我们提供了 tcpip_input() 函数来处理这个问题, 虽然他并没有在 rawapi 一文中说明。讲到这里,读者应该知道tcpip_input()函数投递的消息从哪里来的答案了吧,没错,它们来自于由底层网络驱动组成的接收线程。我们在编写网络驱动时, 其接收部分以任务的形式创建。数据包到达后, 去掉以太网包头得到 IP 包, 然后直接调用tcpip_input()函数将其 投递到 mbox 邮箱。投递结束,接收任务继续下一个数据包的接收,而被投递得 IP 包将由 TCPIP 线程继续处理。这样,即使某个 IP 包的处理时间过长也不 会造成频繁丢包现象的发生。这就是 lwip API。
BSD API 提供了基于 open-read-write-close 模型的 UNIX 标准 API,它的最大特点是使应用程序移植到其它系统时比较容易,但用在嵌入式系统中效率比较低,占用资源多。这对于我们的嵌入式应用有时是不能容忍的。
2、硬件工程搭建
Step1: 添加 MIG IP 和 Clocking Wizard
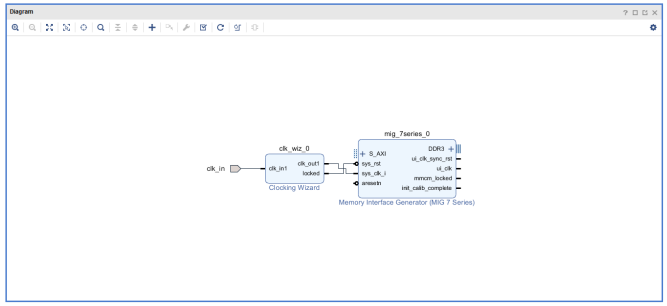
图8‑100 添加 MIG IP 和 Clocking Wizard
Step2: 添加 Microblaze IP
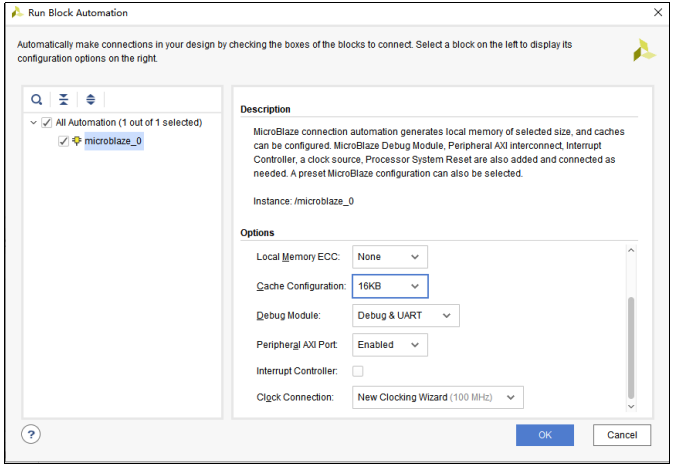
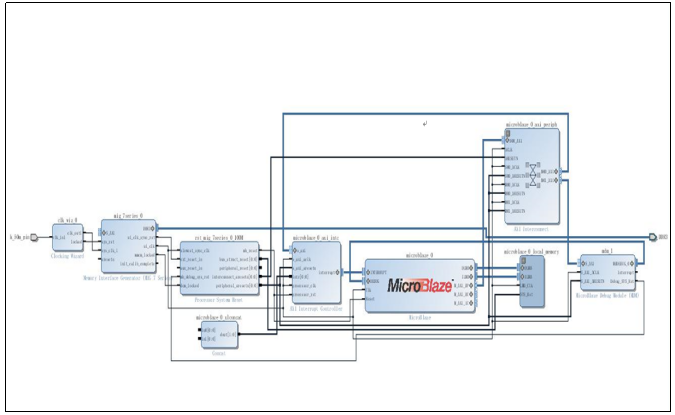
图8‑101 添加 Microblaze IP
Step3:添加 AXI Ethernet IP。
设置 IP 如下,其他默认
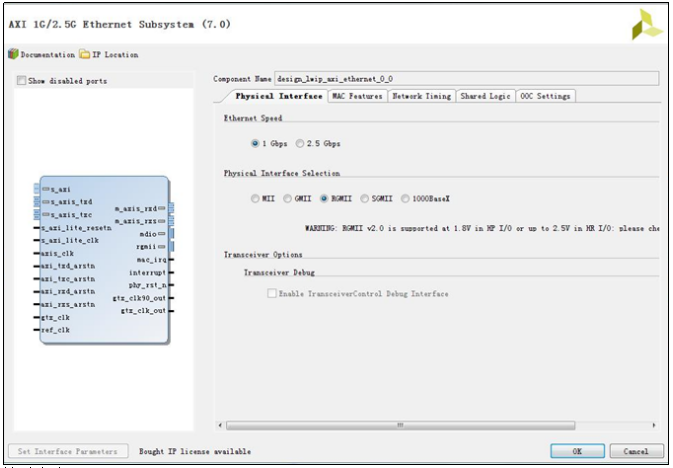
图8‑102 设置 IP
然后点击 Run Block Automation

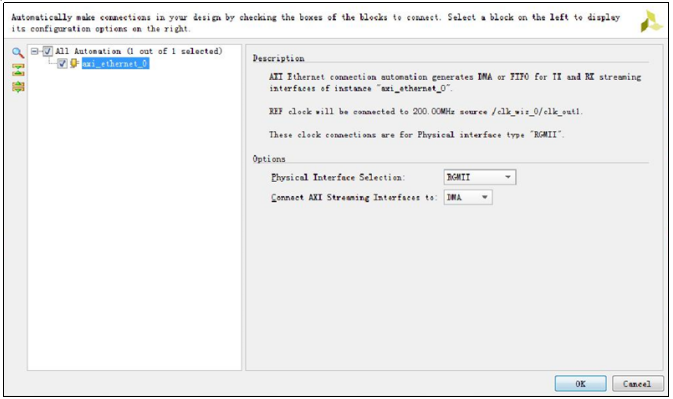
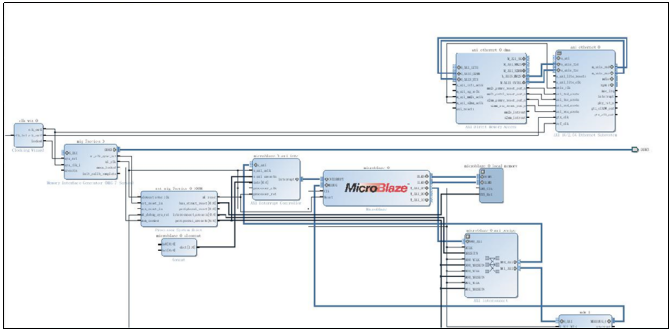
图8‑103 Run Block Automation
Step4: AXI 1G/2.5G Ethernet Subsystem 中 gtx_clk 的输入时钟是 125Mhz ref_clk 的输入时钟是 200Mhz,作为其内部 IDELAYCTRL 的参考时钟。
通过 AUTO 自动连接,vivado 会自动通过 clk_wiz_0 输出时钟。
然后点击 Run Connection Automation
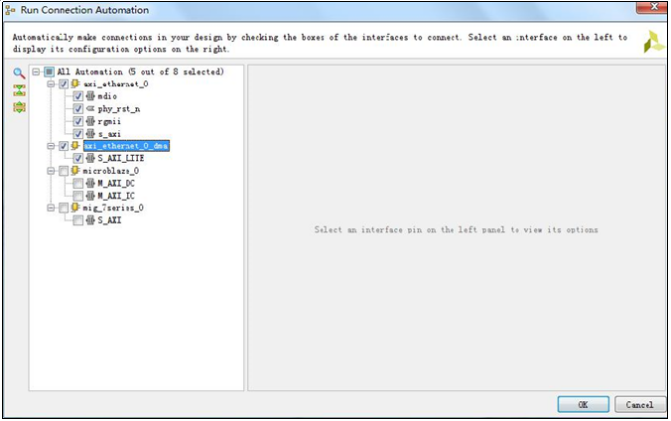
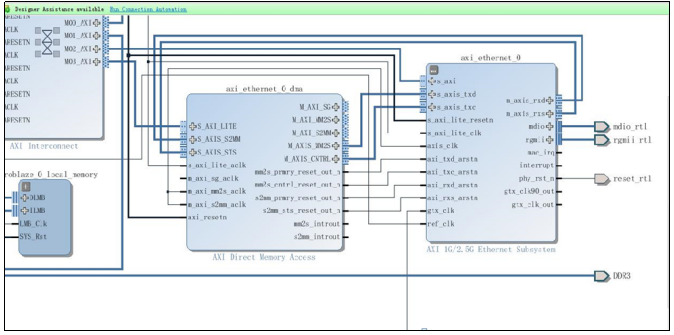
图8‑104 Run Connection Automation
其中 m_axi_sg_aclk 和 s_axi_lite_clk 及 m_axi_mm2s_aclk 都是系统时钟 100Mhz,将连接到一起。
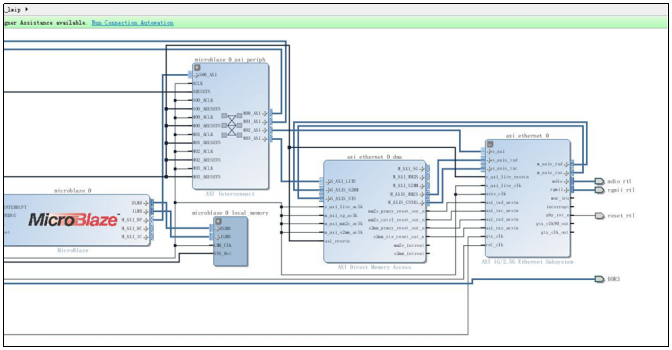
图8‑105 IP连接
Step5: 添加 AXI Timer 和 axi_uartlite IP
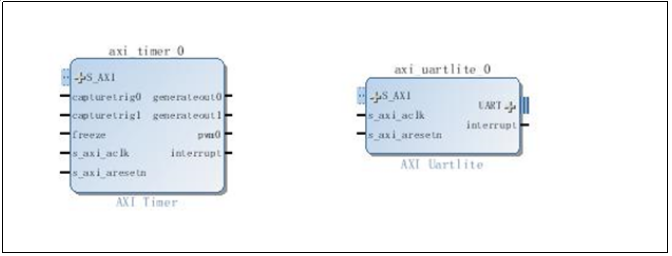
图8‑106 添加 AXI Timer 和 axi_uartlite IP
Step6: 点击 Run Connection Automation。
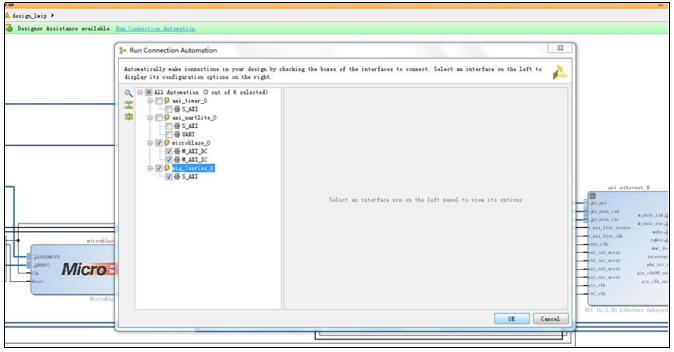
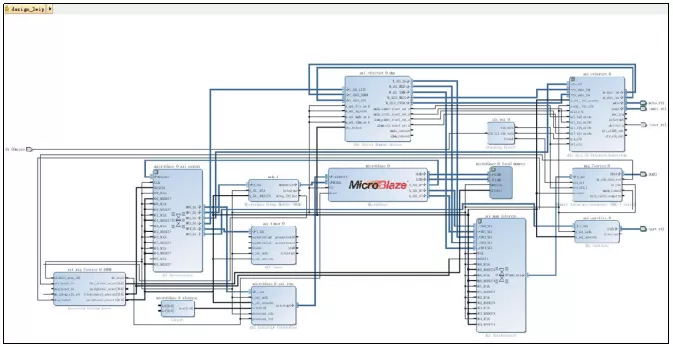
图8‑107 点击 Run Connection Automation
Step7: 连接中断
将 microblaze_0_xlconcat 的 Number of Ports 设置为 5
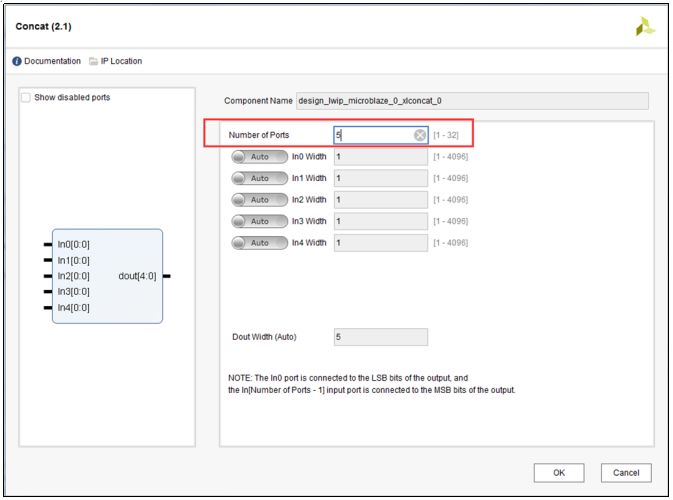
图8‑108 连接中断
Step8:axi_ethernet_0_dma 的中断 mm2s_introut、s2mm_introut 连接到 microblaze_0_xlconcat 两个端口上
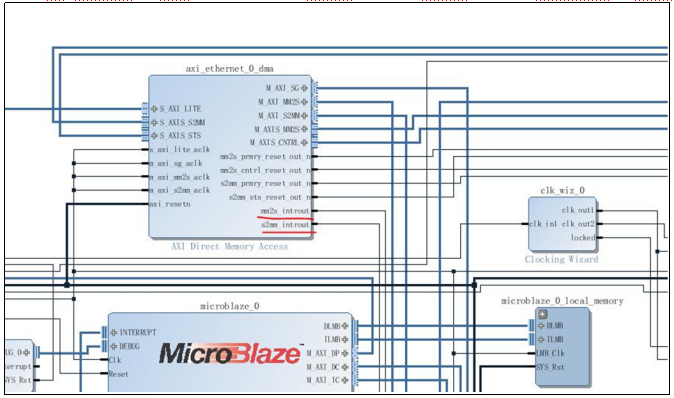
图8‑109 连接中断
Step9:将axi_ethernet_0 的 mac_irq、interrupt 连接到 microblaze_0_xlconcat 两个端口上
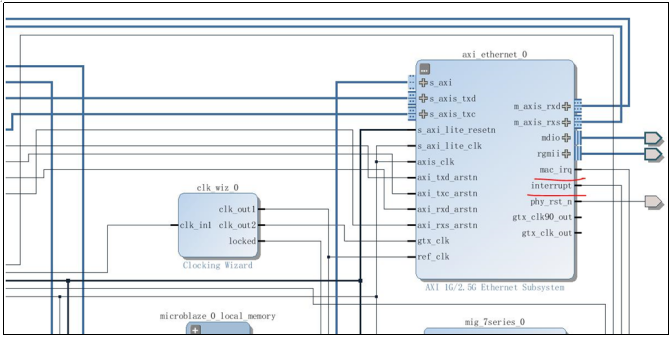
图8‑110 连接中断
Step10:将 axi time 的 interrupt 连接到 microblaze_0_xlconcat 最后一个端口上

图8‑111 连接中断
完成的硬件原理图

图8‑112 完成的硬件原理图
Step11:连接完成后,添加 xdc 文件,然后 Generate output,生成顶层文件
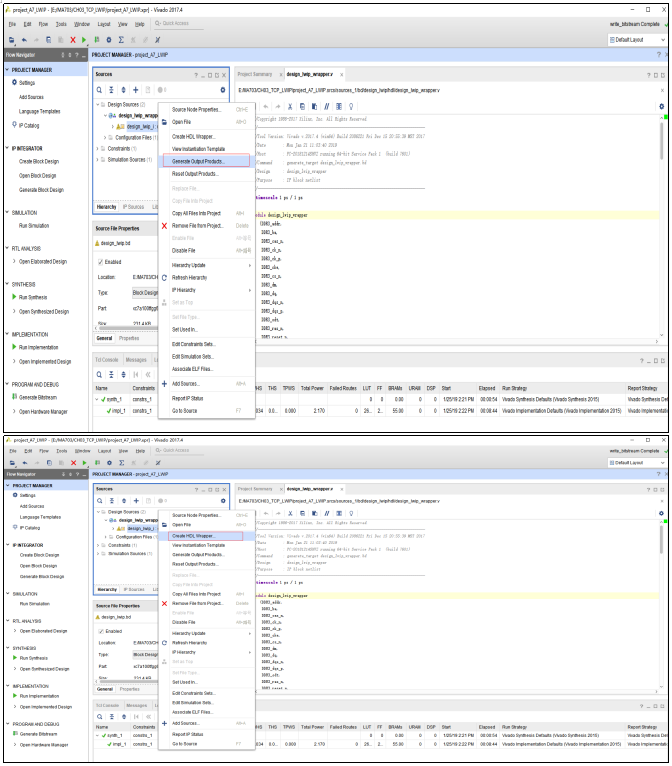
图8‑113 完成
8.5.6.3 LWIP库的修改
Xilinx SDK 目录下面 xaxiemacif_physpeed.c 文件里面对 PHY 芯片有驱动,目前支持 MARVEL 和 TI 的部分 PHY 芯片,如果使用其他厂家的 PHY 芯片,需要更改驱动,否则协商不能通过。
首先,找到 SDK 安装目录下的 LWIP 库的路径,例如:
C:\Xilinx\SDK\2017.4\data\embeddedsw\ThirdParty\sw_service
将lwip141_v1_7 文件夹复制一份到工程目录的 sdk_repo\bsp 文件夹下,将其重新命名为 lwip141_v2_04。第一步,修改 lwip141_v2_04\data\lwip141.mld 文件(可用 Notapad++等编辑器打开),将其中的版本编号。
OPTION VERSION = 2.0;
修改为
OPTION VERSION = 2.08;
由于
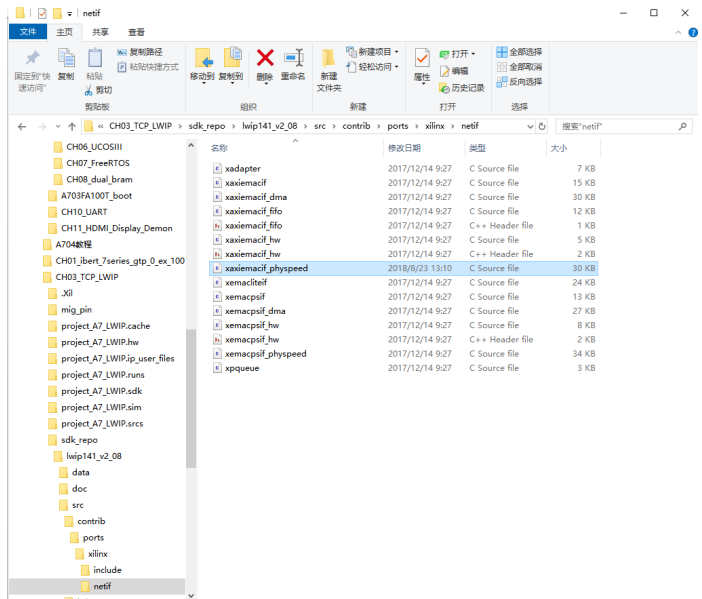
打开 lwip141_v2_04\src\contrib\ports\xilinx\netif\xaxiemacif_physpeed.c 源文件,增加宏定义
#define Broadcom_PHY_IDENTIFIER 0x143
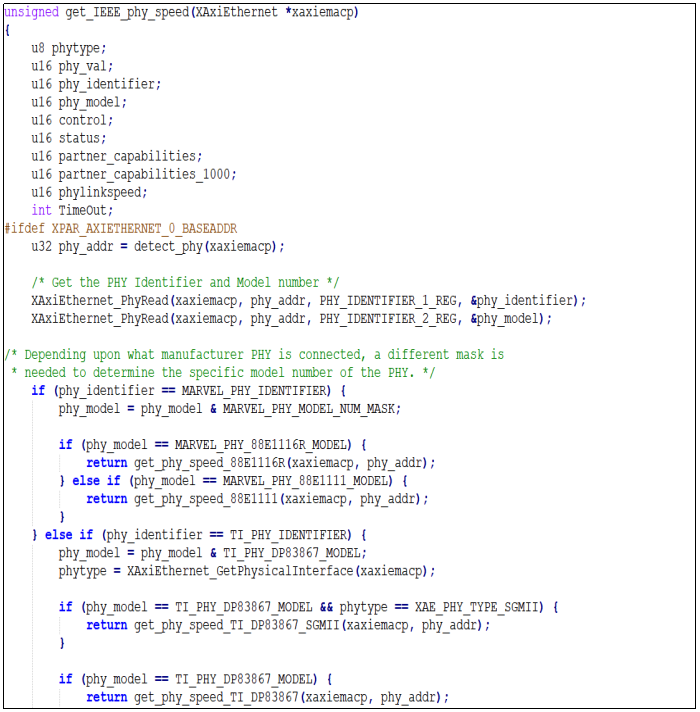

图8‑114 代码分析
8.5.6.4 软件设计
新建SDK工程,导入修改过的lwip库文件

图8‑115 导入修改过的lwip库文件
新建LWIP工程
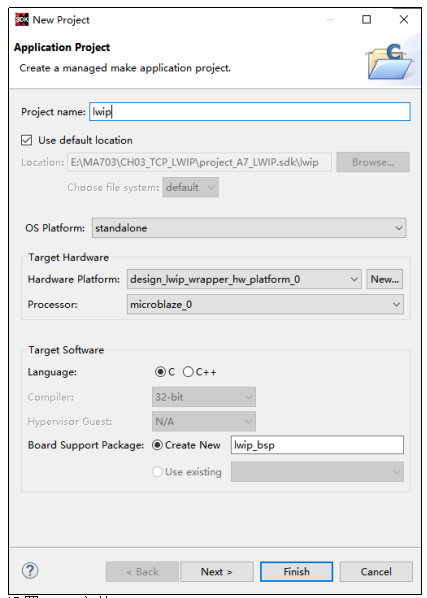
图8‑116 新建LWIP工程
设置BSP文件
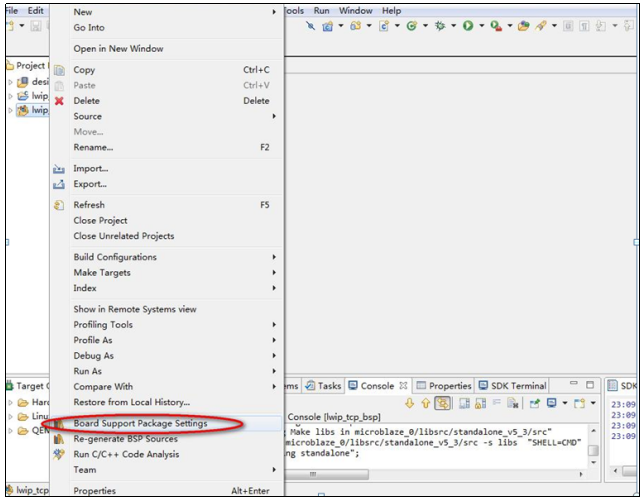
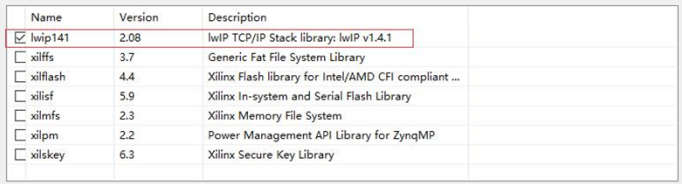
图8‑117 设置BSP文件
测试
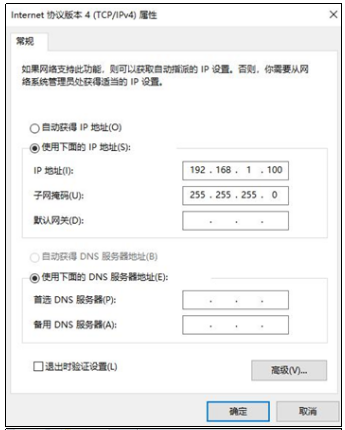
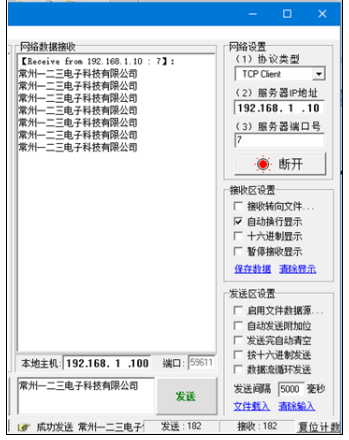
图8‑118 测试
8.5.6.5 需要注意的问题
根据不同的 PHY 芯片修改 LWIP 底层
Xilinx SDK 目录下面 xaxiemacif_physpeed.c 文件里面对 PHY 芯片有驱动,目前支持 MARVEL 和 TI 的部分 PHY 芯片,如果使用其他厂家的 PHY 芯片,需要更改驱动,否则协商不能通过。
在Microblaze 的 AXI Ethernet 里面有对 RGMII 接口的时序约束,不同的芯片需要修改约束的时间,如果差别不是很大则不修改也可以进行工作。
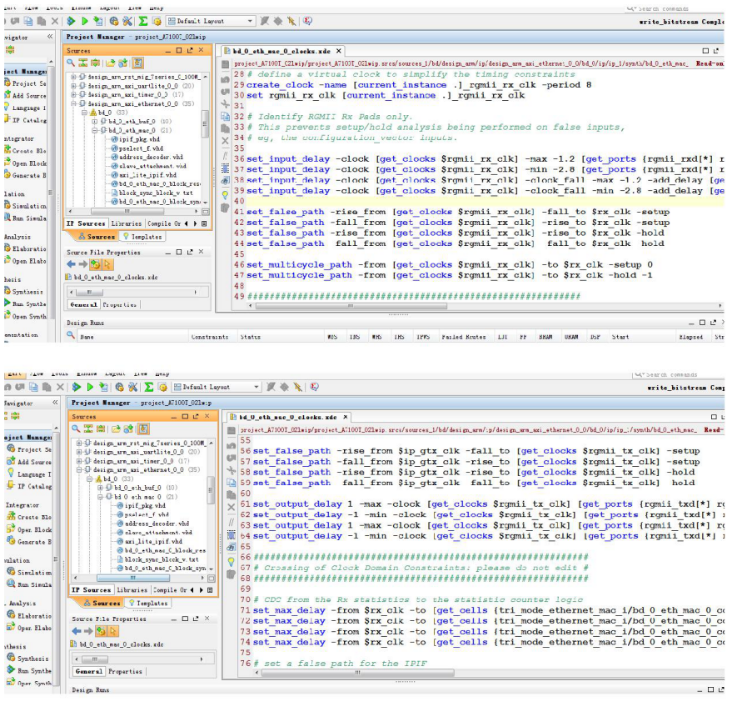
OUTPUT DELAY约束
需要注意是,在 AXI 1G/2.5G Ethernet Subsystem 中,rgmii_txc 的发送时钟 gtx_clk90,与 rgmii_td、rgmii_tx_ctl 的发送时钟 gtx_clk 存在 90°即 2ns 的相位差。因此,此时 PHY 芯片 RGMII 的 TX 接口时序不能使用默认的内部延迟模式,需要使用外部模式,其时序关系如下图。
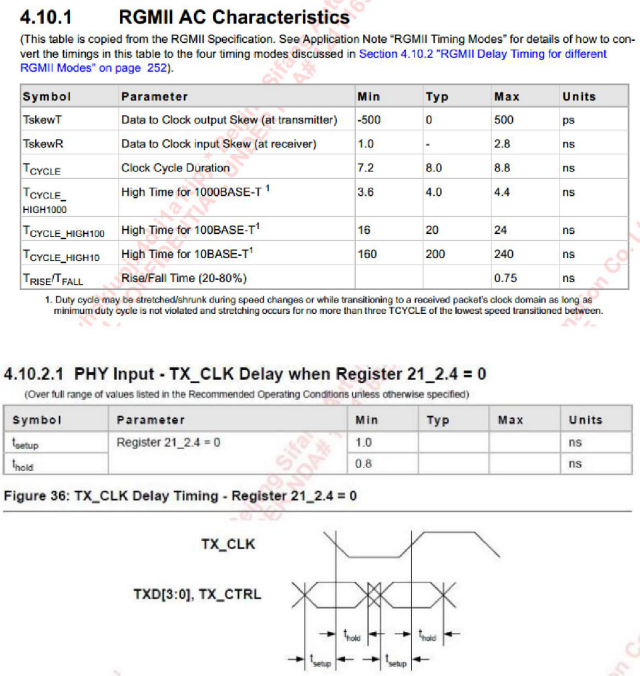
照上图中的 setup time 和 hold time, output delay 的 min 应该为-0.8ns, max 应该为 1.0ns。忽略 PCB 延迟
·INPUT DELAY约束
对于 input,需要使能内部延迟模式,
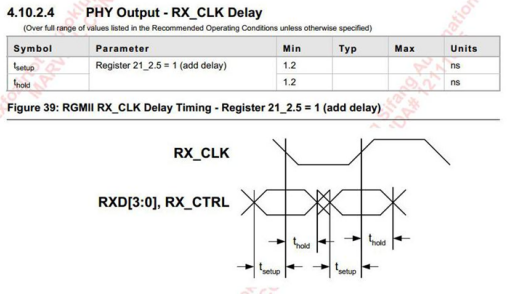
按照上图中的 setup time 和 hold time,input delay 的 min 应该为-(4-1.2)=-2.8ns,max =-1.2ns。忽略 PCB 延迟
因此需要查看 PHY 芯片的寄存器,确认使用 TX 外部模式,RX 使用内部延迟模式。