机器人是工业自动化系统的终极表现。工业控制、通信、机器视觉、机器学习、人机界面、网络安全和安全可能是在构建合作机器人、工业机器人或机器人的其它商业应用时需要考虑的关键技术。Xilinx SoC 和 FPGA 可为机器人实现模块化方法,其提供可重复使用并可扩展的通用嵌入式软硬件平台,显著缩短上市时间、缩小外形,降低总体拥有成本,同时还可最大限度提高这些资产的智能性和适应性。具体来说,Xilinx SoC 和 FPGA 可实现:
通过控制环路的并行处理,对可扩展的运动轴数量进行精确确定性控制
通过多种工业以太网标准进行连接,包括支持有时间限制的联网 (TSN)
支持多种不同的传感器输入,可实现传感器融合和高层次传感器技术
实时分析和机器学习支持预测性维护控制、远程诊断、数字“双胞胎”以及更多的端点智能使用案例
集成人机接口 (HMI)
符合 IEC 61508 SIL 3 功能安全以及 IEC 62443 网络安全
通过最高层次的集成,缩小物理尺寸并降低功耗
< >
| 设计范例 |
说明 |
器件支持 |
点击放大 |
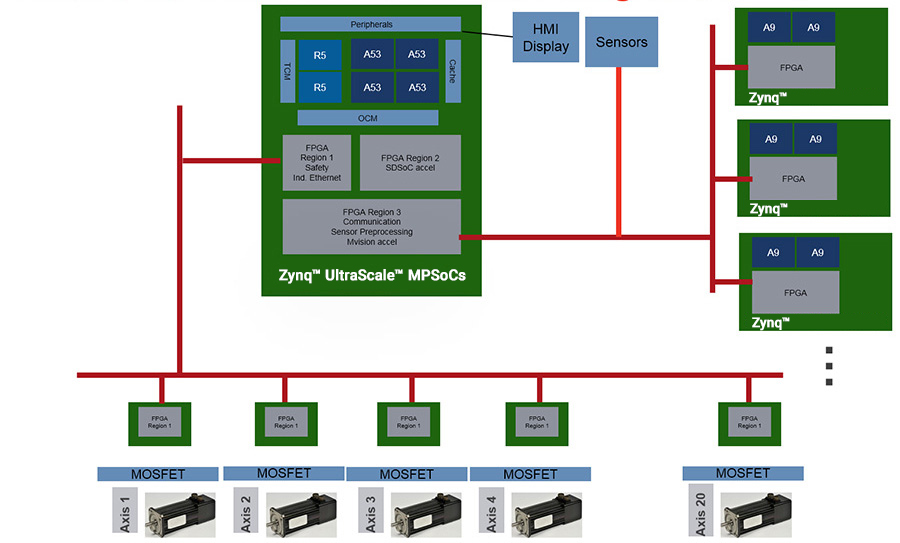
全面集成的机器人控制
- 从视觉和非视觉传感器进行元数据处理
- 机器人运动规划与安全运动
- 运动控制器
- 传感器总线管理
- 摄像头总线管理、GigE Vision 等或 EtherCAT、Profinet 和 Powerlink 等工业以太网
- HMI
- 安全运动要求:PLe CAT3
多轴运动控制
- 嵌入式安全运动
- 带安全层的 EtherCAT 主堆栈(或其它工业以太网)
- 安全要求:Ple CAT 4
支持最低驱动能力和安全性的多轴功率级
- MOS FET 或 SiC 驱动级
- 数字编码器
- 安全需求: Ple CAT 4
机器视觉相机
|
Zynq UltraScale+ MPSoC
Zynq-7000 SoC
Spartan-7 FPGA
Artix-7 FPGA
|
更多详情请点击: https://china.xilinx.com/applications/industrial/robotics.html#overview