三分钟教你快速选择机器视觉传感器
judy 在 周二, 01/11/2022 - 10:21 提交
目前,机器视觉传感器在当代的应用可谓是越来越广泛,如何选择机器视觉传感器是值得我们好好学习的,现在我们就深入了解如何选择机器视觉传感器。
目前,机器视觉传感器在当代的应用可谓是越来越广泛,如何选择机器视觉传感器是值得我们好好学习的,现在我们就深入了解如何选择机器视觉传感器。

赛灵思的以太网MAC可以应用时间戳。然而,Xilinx IP 希望用户提供准确的时间戳,然后 MAC 将其与流经的每个数据包联系起来。创建和维护准确的时间戳是用户提供的IP的责任。
大家都知道FPGA这玩意是老美搞出来的,所以很多术语都是翻译自英语。接下来就看几个在日常的技术文档中常见的拼写错误吧。
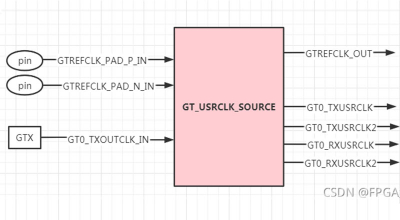
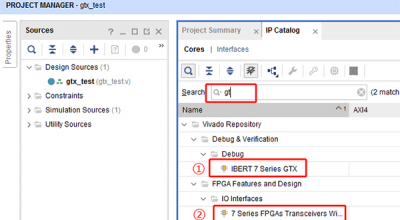
理解一个IP的用法,最好的办法就是打开官方的Example Design。 所以本文首先介绍Example Design,然后再替换成我们自己的收发测试模块,对比印证学习,差不多就能勉强把GTX给玩起来了。

运行ORB_SLAM3时,遇到错误“libpng12.so.0: cannot open shared object file: No such file or directory”。执行命令“sudo apt install libpng12-0”,可以按照libpng12.so.0,解决这个问题。

首先回想一下,在平常的设计中我们是不是经常采用同步复位或者异步复位的写法,这一写法似乎都已经形成了肌肉记忆----每次我们写always块的时候总是会对所有的寄存器写一个复位赋初值的语句。
作为一名初学者,也曾被GTX一堆信号搞得头晕脑胀,在学习了各位大佬的文章后,结合自己的理解和实践,整理这一系列快速上手的GTX使用教程。

Ubuntu18.04安装ROS ros-melodic-desktop-full时,遇到错误“unmet dependencies. Unable to correct problems, you have held broken packages."。

为满足低电压数字讯号(LVDS)和并行输出ADC的需要,延迟不一致的问题,对系统设计人员而言是一个难题

IBUFDS、和OBUFDS都是差分信号缓冲器,用于不同电平接口之间的缓冲和转换。IBUFDS 用于差分输入,OBUFDS用于差分输出。