自动驾驶芯片需要满足高吞吐与低时延
judy 在 周三, 12/16/2020 - 09:47 提交
智能驾驶驱动的汽车行业正在走向电气化时代,全球各大车企都在加速电气化进程。未来智能驾驶将朝有哪些关键技术发展,有哪些阻碍发展的痛点,如何解决?以下为本刊独家采访赛灵思汽车电子系统架构师毛广辉实录。
智能驾驶驱动的汽车行业正在走向电气化时代,全球各大车企都在加速电气化进程。未来智能驾驶将朝有哪些关键技术发展,有哪些阻碍发展的痛点,如何解决?以下为本刊独家采访赛灵思汽车电子系统架构师毛广辉实录。
Xilinx为MPSoC支持4种libMali的backend: X11, Wayland/GBM, Fbdev, Headless-EGL。QT支持4种plugin(插件)或者backend,FB,X11,Wayland,eglfs。对不同的plugin(插件)或者backend,QT应用层是一样的。

基于UltraScale架构的FPGA的封装和引脚规格不同。包括7系列FPGA在内的前几代产品。这些细节在此概述。

InAccel 的 Accelerated Machine Learning Studio(AML)是一个完全集成的框架,可在不更改代码的情况下加速 C / C ++、Python、Java 和 Scala 应用。

A、B、C、CARRYIN、CARRYINSEL、OPMODE、BCIN、PCIN、ACIN、ALUMODE、CARRYCASCIN、MULTSIGNIN以及相应的时钟启用输入和复位输入都是保留端口。D和INMODE端口对于DSP48E1片是唯一的。本节详细描述DSP48E1片的输入端口

随着云计算的兴起,越来越多的计算被部署到云端来执行,数据中心的运营模式逐渐云化,从接入模式来看,当前部署的云计算主要分为公有云、私有云和混合云。私有云主要是单位或者个人使用的云计算资源,不对外提供,因此可以不兼容传统以太网,在诸如高性能的分布式计算应用场景下有较好的应用前景
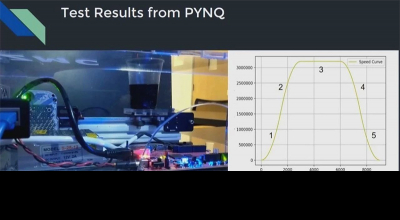
这项工作是由加州州立理工大学波莫纳分校、C3SR的产学合作课程设计项目。该项目的目标是创建一个通用的运动控制器,与任何运动控制系统或设备兼容,解决工业和开源运动控制器中的问题,同时也相对便宜,易于对创作者群体进行扩展。
观看 Zynq-7000 安全设计的演示,了解我们独特的功能安全方法。

在vivado中 ,如何查看各个模块的资源占用情况呢?方法如下:

在 FPGA 中,JTAG 管脚除了负责原始的芯片测试功能 (IEEE1149.1),还主要用于下载和调试,比如ILA就是通过 JTAG 接口捕捉内部逻辑信号,送回 ISE 或 Vivado,并在界面上直接显示和控制。BSCANE2 其实就是实现这一内外沟通的关键核心模块,这部分实现对于用户来说是透明的。 那么如何利用BSCANE2 模块,构建用户自己的专用内部扫描链/功能链呢?