战斗机器人“Switchback”采用了 KRIA SOM,适用于 AI 和视觉系统
judy 在 周四, 06/02/2022 - 16:28 提交
SwitchBack 团队使用 KV260 视觉 AI 入门套件和 Kria™ SOM 来添加 AI 功能和视觉辅助功能,以确定对手机器人并旨在实现前所未有的自主权和准确性水平。
SwitchBack 团队使用 KV260 视觉 AI 入门套件和 Kria™ SOM 来添加 AI 功能和视觉辅助功能,以确定对手机器人并旨在实现前所未有的自主权和准确性水平。

本视频涵盖了 AMD-Xilinx 2022.1 版嵌入式软件环境中的新增功能和更改。
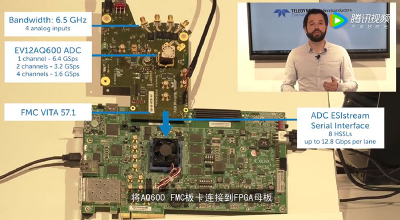
本视频带您学习如何简单地下载并创建Vivado工程,实现ADC EV12AQ600/605的串行接口,并缩短您的开发时间。
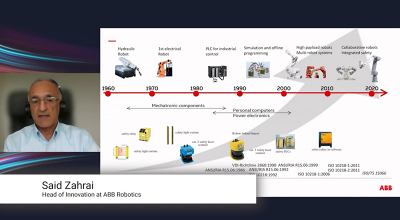
通过本视频,您将了解 AMD-Xilinx 的自适应计算技术如何助力开发 ABB Robotics 的最新系列协作机器人 GoFa™。

本视频介绍了可编程逻辑 (PL) 电源管理。PL 时钟控制是最有效的电源管理方法。

本视频提供了在 MPSoC GPU 上实现 Linux 运行时电源管理的示例。
本视频简要介绍面向EV12AQ600/605 ADC的ADX4和ADX2 IP。

该视频介绍了电源域和电源状态的概念,以及如何在您的设计中使用 Ultra96 实现电源域切换。
本视频描述了使用频率调整优化单位功率性能,以及频率调整方法及其权衡。

该视频介绍了 Power Islands 及其 API 的概念。