技术

加速机器人及自主系统控制开发——MATLAB/Simulink 驱动先进控制应用(上)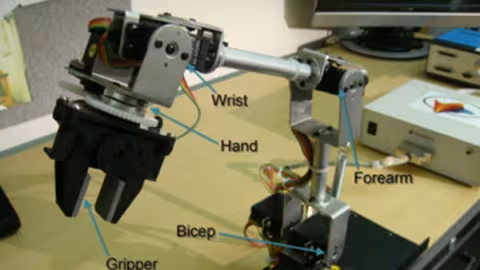
作为机器人控制工程师,你有没有过这样的经历?明明反复调试了多个控制回路的 PID 参数,机器人的动作还是不够稳;机械臂在高速运动时抖动严重,轨迹跟踪总差那么一点;




处理MultiBoot升级半程掉电的原理和最基本方法
之前在《一个思路: 缩短MultiBoot流程中的回跳 (Fallback) 时间》中,提到过FPGA无法处理升级Image过程中半程掉电的情形。但是仍然陆续有客户咨询这个问题。

YunSDR小课堂-信号与系统(第62讲)
连续时间模拟信号可通过采样和量化转换为离散时间数字信号,其中连续模拟输入信号 xa(t)被转换为离散数字输出信号 x[n]。采样是将连续时间信号转换为离散时间信号的过程

将Primus生成的波形文件导入MATLAB的处理过程和技巧
Primus 生成的波形 vcd 文件,需要进行怎样的预处理和格式转化,才能允许 MATLAB 直接导入呢?本文将给大家分享这个过程的实现步骤,技巧和经验。




为什么Timing_Summary的THS与所有Clock Interaction内所有的sub-THS的和不相等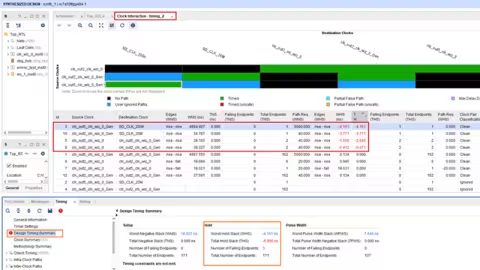
Design Timing Summary内的THS与Clock Interaction 内所有时钟之间的THS的和不相等


Enclustra 水星Mercury+ XU1核心板将边缘人工智能送入卫星轨道
Klepsydra与Enclustra合作,将人工智能框架与紧凑型FPGA硬件平台相结合,为卫星打造出兼具成本效益与高性能的人工智能计算平台


YunSDR小课堂-软件定义无线电概论(第60讲)
微电子产业在过去六十年中迅速发展,推动了微处理器系统的诸多进步,使我们日常所依赖的诸多应用成为可能。随着时间推移,这一演进速度正如著名的摩尔定律所描述


Hyperlynx仿真系列 (二): Versal GTM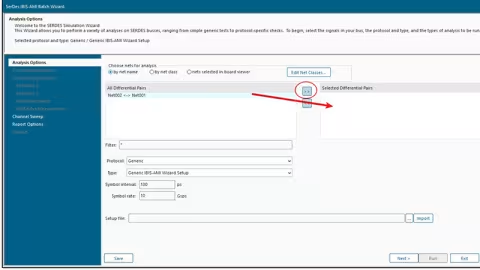
本文简单介绍了如何用Hyperlynx来做GTM的 IBIS AMI的PAM4仿真,以及可以通过仿真输出文件来画出Sampled Eye以帮助分析。


