Petalinux制作linux系统
judy 在 周一, 08/12/2019 - 09:31 提交
这里引用的u-boot,kernel,busybox版本分别是:
u-boot : U-Boot 2017.01
kernel : 4.9.0-xilinx-v2017.4
busybox : BusyBox v1.24.1
这里引用的u-boot,kernel,busybox版本分别是:
u-boot : U-Boot 2017.01
kernel : 4.9.0-xilinx-v2017.4
busybox : BusyBox v1.24.1

下载modelsim,这里用的是modelsim10.4版本。完成下载和安装,在安装文件夹中可以看到uvm-1.1d,这是我们使用的uvm版本。在uvm-1.1d/win64下有uvm_dpi.dll文件,这是已经编译过的uvm库。

根据Zynq MPSOC的设计,EMIO占用GPIO BANK3至5的全部32位,对应GPIO的序号78至174,共96个EMIO但是在PS模块中引出的PL中断会默认占用高序号值的EMIO,如本实验中PS模块的pl_resetn0复位信号占用了序号174的EMIO
本文档提供Alveo U50数据的硬件和软件安装过程。Alveo U50 卡采用赛灵思 UltraScale+™ 架构,率先使用半高半长的外形尺寸和 低于75 瓦的低包络功耗。该卡支持高带宽存储器 (HBM2),每秒100G 网络连接,并支持第四代 PCIe 和 CCIX 互联标准。

TCP的工作机制比UDP要复杂的多。本文介绍用TCP发送“Hello World”的实例,讨论程序设计中几个关键的问题。本文撰写思路假设您已经阅读了本系列前几篇与lwIP、UDP相关的文章,重复性语言不过多描述。本文TCP工作在client模式。TCP内容较多,后面的文章会逐步深入介绍

在本次网络研讨会中,您将能了解到赛灵思最近发布的机器学习套件,以及在该套件上运行 CNN 加速器的详细介绍,该套件可方便地部署在亚马逊 EC2 云上。现在注册,了解如何使用基于云的软件堆栈以评估、开发和部署机器学习功能至 AWS 云端的应用中
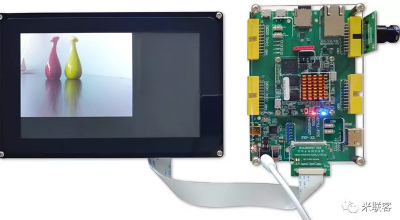
在实际开发中,我们会经常使用到LCD屏,LCD屏的种类有很多种,对应的使用方法也有所不同,但是,在ZYNQ 图像传输开发中,思路大体类似,下面介绍在ZYNQ中,使用LCD显示OV5640图像方法

据麦姆斯咨询介绍,在工业领域,机器视觉系统被广泛用于自动检验、工件加工、装配自动化以及生产过程控制和监视图像识别。对产品质量的高要求,促进了机器视觉在汽车、电子、半导体、食品和包装等行业的快速发展

bram的由很多latches和寄存器构成的bram块构成,通过Mux数据选择器,将数据送入输出寄存器,最终输出。由此图可知,bram的reset仅仅对输出寄存器重置,而不会重置内部存储数据
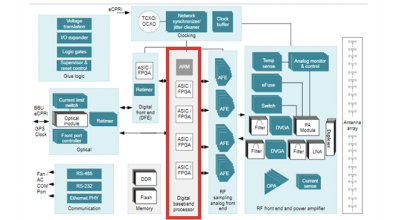
5G是目前通信设备领域的市场趋势, Massive MIMO指的是64T64R应用中常用的多输入和多输出, 更多的发送器和接收器通道需要更多的数字处理器(FPGA / ASIC)来执行数据传输,而典型的64T64R MIMO应用中通常需要4-5个数字处理器。 每个FPGA都需要自己的电源上电/下电的时序,以便FPGA能够正常工作