本文将介绍如何利用Vivado和petalinux开发Zynq7000系列芯片的SPI外设接口。
开发环境:
Vivado 2015.4
Petalinux 2015.4
一、 硬件工程的搭建
1. 打开vivado开发环境,新建工程,并选择你所使用的芯片型号(本文使用xc7z045ffg900-2这款芯片);
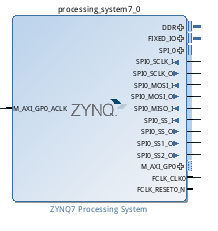
2. 点击“CreateBlock Design”创建一个新的工程桌布,在其中添加IP,将ZYNQ7芯片IP添加进来;
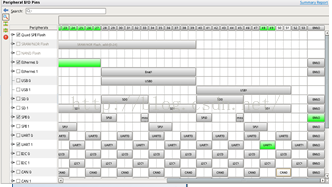
3. 双击ZYNQ7芯片IP,点击界面左边的Peripheral I/O Pins对芯片的引脚进行配置,分别点击“Quad SPI Flash”、“Ethernet”、SPI0最右边的“EMIO”和“UART1”对这些外设引脚进行使能;
4. 打开“DDRConfiguration”页面,点击“DDR Controller Configuration”,然后点击下拉菜单,选择你所使用DDR类型,本文选用MT41J256M8 HX-15E这款DDR芯片,如图所示;

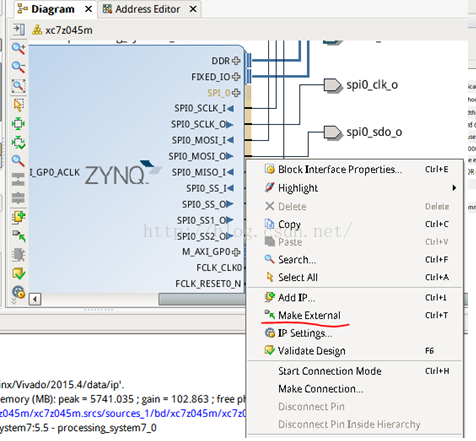
5. DDR配置完成后,退出ZYNQ配置界面,点击ZYNQ7 IP中的SPI引脚,选择相应的IO端口,右键点击并选择Make External将引脚向外引出。
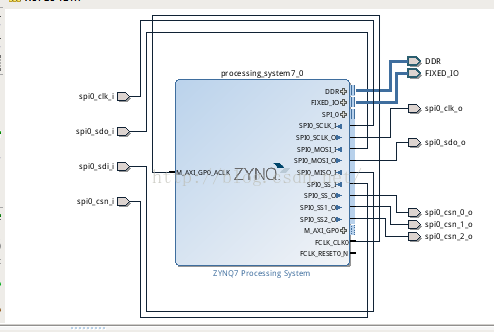
6. 所有SPI相关引脚引出后,如下图所示,点击auto connetcion将DDR与FIXED两个引脚引出;
7. 引脚配置完成后,在顶层文件中对ZYNQ7这个IP进行例化,在“source”界面栏中双击顶层文件,打开硬件代码编辑器;
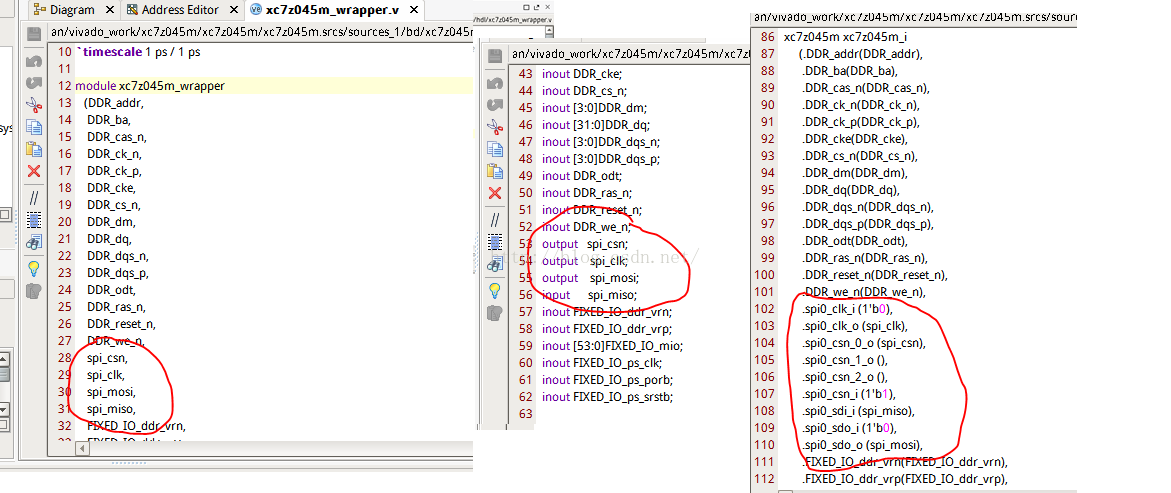
8. 在右边的顶层.v代码中添加spi相关的端口和例化代码,添加的代码如下所示(由于本例中只使用到了spi的四个接口,因此在例化spi接口时,只用到了其中的四个,其它的悬空或直接输入高低电平);
9. 代码添加完成后,对工程进行综合(synthesis)和布局(implementation),综合和布局通过完成后,对管脚进行约束,点击“open implementation”打开布局结果,点击最上方的“Windows”选中“I/O Ports”,对SPI的外部接口进行约束(根据原理图中接口的连接,选中对应的硬件管脚);
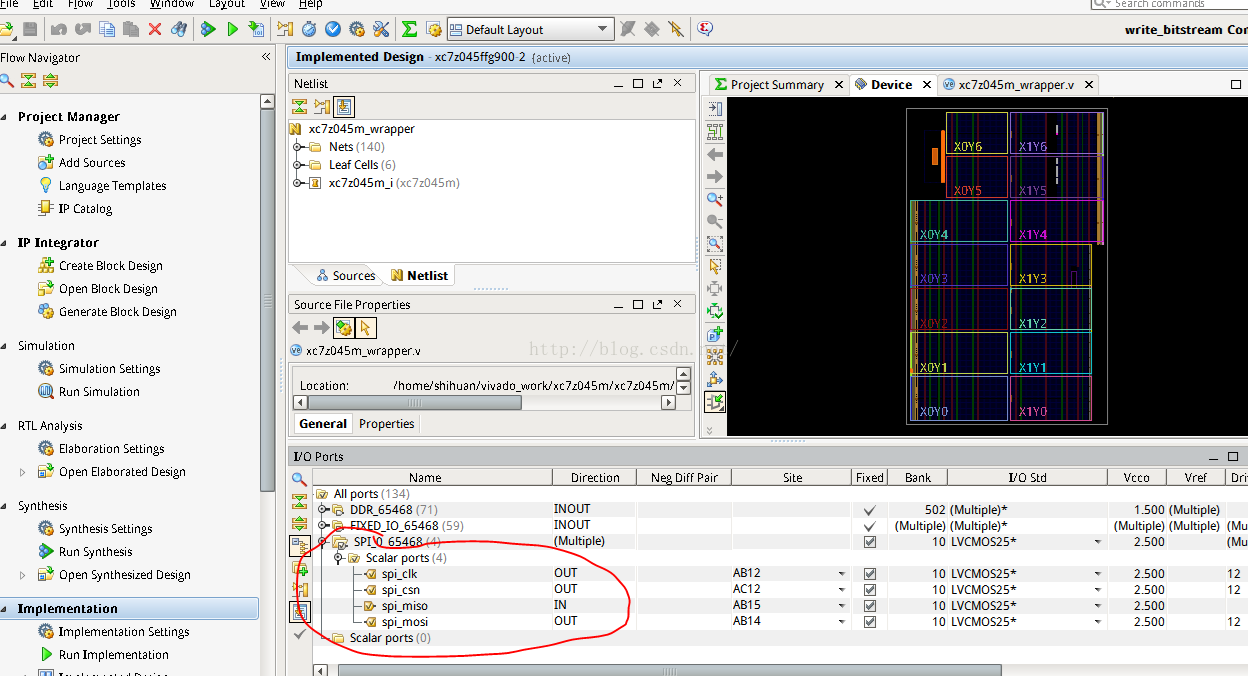
10. 管脚约束完成后,重新对工程进行Implementation;
11. 最后点击“GenerateBitstream”生成bit文件;
12. 点击“File”—“Export”——“Export Hardware”导出硬件工程;
二、硬件工程的搭建
1. 在Linux中,利用petalinux创建一个Zynq工程;
2. 利用petalinux-config–get-hw-description命令将刚才vivado下所生成的硬件工程.hdf文件导入到软件工程中;
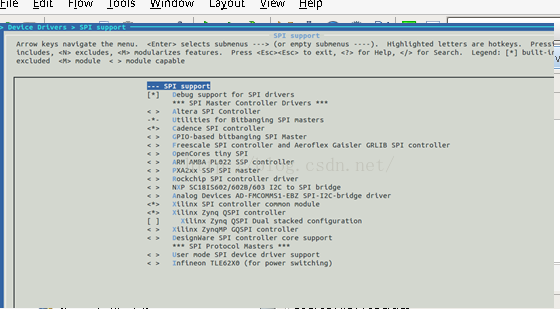
3. 利用petalinux-config–c kernel对内核进行裁剪,选中驱动中的SPI驱动如图;
4. 利用petalinux-build工具编译整个工程,然后利用petalinux-package生成BOOT.bin文件;
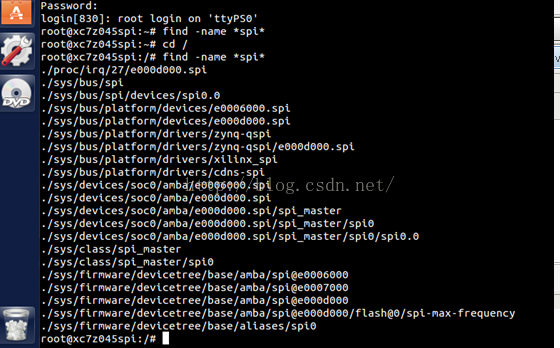
5. 利用硬件平台或QEMU启动Linux系统,即可在系统中看到spi驱动
版权声明:本文为CSDN博主「零阶简振波」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/DJason43/article/details/52639361