ZYNQ学习之路——CAN总线学习
judy 在 周日, 09/26/2021 - 10:07 提交
本文简要介绍CAN总线协议,以Linux驱动CAN网络为重点介绍。
本文简要介绍CAN总线协议,以Linux驱动CAN网络为重点介绍。
如何将Vitis AI Library应用加入Vitis进行编译,生成可执行文件?

在运行Vitis AI VART例程时出现如下问题,在读取视频时出现错误。 需要在配方文件中加入opencv功能 进入工程目录

在虚拟机中的ubuntu中开发linux系统驱动程序,往往直接使用gedit编辑,makefile编译,而这种方法比较麻烦;Eclipse是开源软件框架,编辑器比较好用,配置好编译器后可以更加方便快捷的开发程序,本文介绍如何使用Eclipse开发Linux的驱动程序。

Vitis AI提供两种应用例程,VART和Vitis AI Library,下文详细描述了VART中自动驾驶应用的实现过程。

Vivado的Implementation主要有三大步:
opt_design,会生成opt_desgin.dcp
place_design,会生成place_design.dcp
route_design,会生成route_design.dcp

Vitis AI提供两种应用例程,VART和Vitis AI Library,下文详细描述了Vitis AI Library中refinedet应用的实现过程。
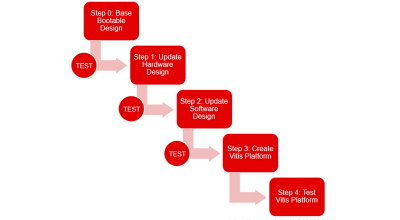
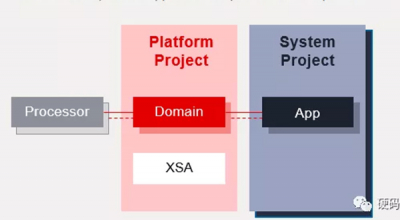
Xilinx提供了一些基础的开发板平台内嵌在Vitis IDE中,用户可以直接从这些platform创建应用程序。但如果是自定义的板卡或者想要部署更多加速器IP、配置不同的性能,我们就需要创建完全自定义的硬件平台。本文介绍创建Vitis AI硬件平台的基本步骤。

将zynqmp单板和电脑主机通过网线连接到同一个交换机。单板和电脑上电后,打开虚拟机,将网络连接设置成桥接模式。进入虚拟机,查询虚拟机ip地址
I/O 信号可通过 MIO 引脚获得, Quad-SPI 控制器在共享或单独的总线配置中最多支持两个 SPI 闪存, 控制器支持以多种配置运行