IP 远程广播制作基于云的工作流程三大考量因素
judy 在 周四, 09/15/2022 - 10:43 提交
与众多其他行业一样,广播商和内容制作商的工作流也受到了思维模式变化带来的影响
与众多其他行业一样,广播商和内容制作商的工作流也受到了思维模式变化带来的影响

RoboRIO 是一款基于可重配置硬件的平台,主要用于学术用途

AMD 近期已开始出货 Versal® AI Edge VE1752 ACAP 预生产器件。

V4L2是Video for Linux2的简称,为Linux中关于视频设备的内核驱动。在Linux中,视频设备是设备文件
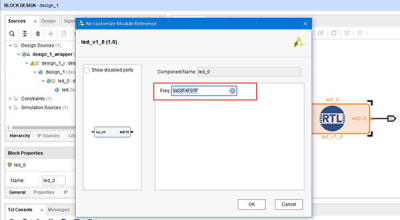
用Vivado开发ZYNQ时,常用到Block Design。Block Design中不仅仅可以添加IP核

该演示简要介绍了 Kria™ 系统级模块和 KR260 机器人入门套件。

一般来说,如果在IPcore配置正确的话,不太需要通过AXI指令来进行参数的修改,不过如果能够支持AXI指令

下一代 7nm 工艺 Versal 实现 4 路 2MP,2 路 8MP 30FPS 相机,1 路激光雷达,1 路毫米波雷达的数据通道处理

在对工程进行综合时,出现综合过程中出现中止或者完全不启动综合,类似下图,明明点击综合启动了几分钟

LUT 或 SICE是构成了 FPGA 的区域。它的数量有限,当它用完时,意味着您的设计太大了!