斯巴鲁最新双目 ADAS 背后的秘密武器
judy 在 周三, 09/02/2020 - 09:26 提交
8月20日,斯巴鲁全新一代 LEVORG 在日本正式开启预订。新车配有最新一代的 EyeSight 主动安全系统套装,车身遍布的360°全景摄像机,配合赛灵思 SoC(System on Chip,片上系统)的强大运算能力,可让车辆实现大范围的碰撞预防能力,新系统与高清地图配合,车辆还能够在临近弯道时协助驾驶者提前进行减速,特定条件下还可实现双手脱离方向盘的辅助自动驾驶。
8月20日,斯巴鲁全新一代 LEVORG 在日本正式开启预订。新车配有最新一代的 EyeSight 主动安全系统套装,车身遍布的360°全景摄像机,配合赛灵思 SoC(System on Chip,片上系统)的强大运算能力,可让车辆实现大范围的碰撞预防能力,新系统与高清地图配合,车辆还能够在临近弯道时协助驾驶者提前进行减速,特定条件下还可实现双手脱离方向盘的辅助自动驾驶。

本文提供了在Zynq® UltraScale+™器件中对BBRAM和eFUSEs进行自我编程的方法。

了解嵌入式软件(如 Linux、Xen Hypervisor 和免费实时操作系统)与构建工具(如 Yocto 和 PetaLinux)在 2020.1 发布周期中的新特性。 该视频将详细介绍在该发布周期中所有的新增功能与修改内容。

对 Vivado 和它的前一代设计套件,ISE 做一个组件功能上的平行比较和总结是很有用的。其目的是让那些具有在 ISE 下工作经验 (但是不具有 Vivado 下经验)的人能够更快的适应新工具的各个特性。详细信息见下表。
在本次网络研讨会上,您将了解 Vitis 环境,以及该环境如何在 Xilinx 平台上实现嵌入式软件和加速应用开发。

描述
在《Virtex UltraScale+ FPGA 数据手册》(DS923) 中,XCVU27P-3E 器件和 XCVU29P-3E 器件的最低量产软件和速度规格已从 Vivado 工具 2019.2 v1.28 更新至 Vivado 工具 2020.1.1 v1.30。

在上一期100小时从零开始:用摄像头认识世界中,暑期学校A班的同学思维巧妙,让摄像头得到了活用。本期小编继续为大家带来使用了摄像头的暑期学校B班优秀作品分享之双目视觉重建系统。让我们一起来看看吧!
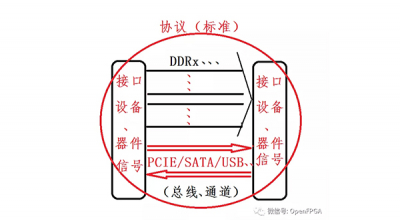
总线、接口和协议,这三个词常常被联系在一起,但是我们心里要明白他们的区别。总线是一组传输通道,是各种逻辑器件构成的传输数据的通道,一般由由数据线、地址线、控制线等构成。接口是一种连接标准,又常常被称之为物理接口。
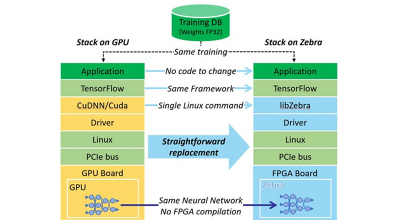
众所周知,实施一个完整的AI应用需要经历训练和推理两个过程。所谓“训练”,就是我们要将大量的数据代入到神经网络模型中运算并反复迭代,“教会”算法模型如何正确的工作